Az előző rész szerint, a hajlékonyságfejlesztés során két párhuzamos feladatunk van: maga a közvetlen fejlesztő módszer, és a testi alapállapot helyreállítása. Ez a rész a mindkettőben közös alapismereteket tartalmazza.
Koordinációs alapokKözponti koordináció
Összetett mozgásunk alapja a belső vázunkról, a gerincről kiinduló mozgásrendszer.
Bár hajlékonyságunkban elvileg a közvetlen végtagízület-vezérlésünk minősége a meghatározó elem, a hajlékonyság mégis jelentősen romlik, ha a több ízületet átfogó, illetve törzsről induló izmok pontatlan vezérlése ellene dolgozik. Utóbbit a nekik alapot nyújtó gerinc különféle hibái oly mértékben befolyásolják, hogy gerincünk állapota szinte egymaga dönthet erő és hajlékonyság vagy annak hiánya közt. A mai, civilizáció okozta hatások miatt, mindazok problémai, akiknek módszertől függetlenül hajlékonysági korlátaik vannak, erre a mechanizmusra vezethetők vissza. Végponti koordináció
Testi alapállapotunkat a végpontok, azaz a lábfejek, kézfejek és a fej(nyak) állapota, tartása és ereje rendkívüli mértékben meghatározza. >>>
Itt egy kétirányú mechanizmus működik a végpontok és a gerincünk között, sokszor el sem dönthető, melyik a felelős egy adott hibáért: mindkettőt ki kell hozzá javítani. >>> állapotfelmérés
Négyláb-koordináció
Természetes mozgásformáink a négy végtag összehangolt mozgásán alapulnak. Nincs olyan ember (sérülést kivéve), akinek a felső és alsó végtagpárja közt lényeges hajlékonysági különbség lenne.
Ez a mechanizmus is kétirányú, és a végtagpárok közt a megfelelő mozgások és a hajlékonyság igyekszik követni a másikat. Ezért ha valamit fejleszteni kívánunk, a többi végtag/testtáj hasonló tartását/mozgását is fejlesszük, igyekezzünk őket szinkronba hozni.
Alapmodell: két csont egy izompárral
Mozgatás egy síkban
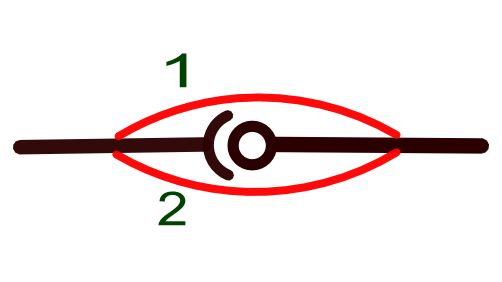
Van két rudunk, azaz a csontok. Egyikük végén foglalat, a másikon gömbfej. Alul-felül izmok. Tegyük fel hogy semmi sincs rögzítve, szabadon elmozdulhat. Mi történik ha a felső izom meghúz?
- a felső izom(1) végpontjai egymáshoz közelítenek
Alapmodell: szabad ízületi mozgás
- a csontok felső fele emelkedik és egymáshoz közelít
- aljuk, azaz a forgáspont lefelé mozdul
- az alsó(2) izom enged, de tart
- az ízületi felszinek kissé közelítenek, ahogy a nyomás nő
A visszafelé mozgatás ugyanígy történik, ott a (2) húz és az (1) enged.
Egy közvetlen mozgási ciklus egy oda és egy visszamozgásból áll. Mindkettő egyformán fontos. >>> Oda_vissza_és_vissza_oda
Ezt a mozgásmintát nagyon jól jegyezzük és értsük meg, ez a szabad ízületi mozgás alapja. Ezt kell nekünk megtanítanunk minden, a hajlékonysági gyakorlatokban részt vevő ízületünknek.
A valóságban nem ennyire szabad a mozgás, hiszen a csontok és ízületek láncban vannak, gerinctől a végpontig. Ám amikor ezt a mozgást minél pontosabban megvalósítjuk, azzal minimálisra csökkentjük a lánc többi tagjának hatását. Ezért nevezhetjük közvetlen ízületi vezérlésnek. Bármely (mozgatható) ízületünket tudjuk így, legalább egy síkban mozgatni.
Csillag: mozgatás több síkban
Szabadabb ízületeink több síkban is mozgathatók így. Vegyük pl a csuklót: ez tetszőleges síkban mozgatható. Csillagnak azt nevezzük, amikor a két fő síkban, ill. ezeket felezve, azaz 8 irányban (É-ÉK-K-DK-...) is mozgatunk. Ennél sűrűbb szögfelosztás csak célzott feladatoknál szükséges.
Szabad forgatás
Forgatás tengelyben
Szabadabb ízületeink forgathatók is, tengely mentén. A még nagyobb szabadsági fokú ízületek (csípő, váll) egyfajta gömbcsuklóban mozognak, ezeknél a tengelyt a feladat határozza majd meg.
- az 1-es izom fordít
- a 2-es enged, de tart
- mindkét csont fordul, azonos tengelyen, ellentétes irányban
A szabad forgatás a tengellyel párhuzamosan nézve nagyon hasonló modellt mutat a szabad mozgatással. A továbbiakban az egyszerűség kedvéért mindig a mozgatós modellre hivatkozom, de ne feledjük, mozgatásra és forgatásra egyaránt vonatkozik.
Forgáshoz hasonló eset, amikor magának a tengelynek egyik végével körzünk, ez a tölcsérkörzés. A kétrétegű modell
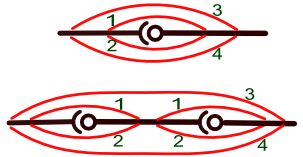
Kétrétegű modell, egy és kétízületes rendszernél
Leggyakrabban hivatkozott, fontos gyakorlati modellünk.
Izületenként-testtájanként több izomréteg is lehet, a modellen ezt két fő rétegre osztottuk: a közvetlen ízületvezérlő-stabilizáló (1 és 2) és az összetettebb mozgató (3 és 4) rétegekre.
A belső, ízületközeli izmok (1 és 2) feladata a stabilizálás és a mozgás megindítása, a külsőké (3 és 4) a további erőrásegítés. Ez a belülről kifelé szabály . Ezt megszegve a mozgásszinkron és ízületi stabilitás romlik, az erő és hajlékonyság elvész. Ezt réteghasználati hibának nevezzük, legtöbb mozgási hibánk ebből adódik. >>> rétegek
Összefoglalás- Izomzatunkat a modellben két fő rétegre osztottuk: belső és külső rétegre. Izületeink megtartását, stabilizálását elsősorban a belső réteg végzi, ugyancsak a belső indítja a mozgásokat. A külső réteg -nagy izomtömege és a tényleges munkavégzés ellenére- ezért funkcionálisan csak rásegítőnek, ráerősítőnek tekintendő.
- A közvetlen ízületvezérlés alapja a szabad mozgatás és forgatás. Ezzel a belső funkcióit újratanítjuk, egyszerű, pontos mozgások segítségével. Az ezáltal pontos tengelyében-forgópontjában forduló, jól megtartott ízület az erő és hajlékonyság sarokköve. Ennek hiányosságait semmilyen összetett szinkronizáció (sportági mozgástanulás) nem képes pótolni vagy elfedni.
- A tényleges mozgásunkat a belső és külső rétegek, illetve egy- és többízületes izmok ebben a sorrendben szinkronizált, összetett rendszere fogja adni. Mind a réteg-, mind a szinkronhibák az erő és hajlékonyság jelentős visszaesését okozzák, helyes közvetlen izületi programok esetén is.


 - Cikksorozat megújult
- Cikksorozat megújult - Cikksorozat frissült
- Cikksorozat frissült A cigány és a kés
A cigány és a kés  Védőfelszerelés és
Védőfelszerelés és  Stílusok az utcán 1.rész
Stílusok az utcán 1.rész  Stílusok az utcán 2.rész
Stílusok az utcán 2.rész  Stílusok az utcán 3.rész
Stílusok az utcán 3.rész  A sípcsontról 1.rész
A sípcsontról 1.rész A sípcsontról 2.rész
A sípcsontról 2.rész